

DYNAMIQUE
- 1. Efforts s'exerçant sur un ensemble mécanique
- 2. Le principe fondamental
- 3. Dynamique analytique pour un ensemble de solides
- 4. Mouvement relatif
- 5. Liaisons mécaniques s'exerçant sur un solide
- 6. Fonction de force
- 7. Intégrales premières des équations de la mécanique
- 8. Galiléens approchés. Accélération de la pesanteur
- 9. Équilibres absolus et relatifs
- 10. Autres applications du principe fondamental
- 11. Bibliographie
Galiléens approchés. Accélération de la pesanteur
Dans l'énoncé du principe fondamental, on a admis l'existence d'au moins un repère privilégié. Il faut maintenant le définir.
Considérant le système solaire comme isolé dans l'Univers, on prend comme repère absolu le repère ayant son origine au centre d'inertie du système solaire et dont les axes ont des directions fixes par rapport aux étoiles fixes (c'est-à-dire dont les distances angulaires apparaissent sensiblement constantes).
La classe des galiléens est définie par l'ensemble des repères en translation rectiligne et uniforme par rapport au repère absolu. Un tel mouvement ne pourra être mis en évidence expérimentalement.
Soit un repère ayant son origine au centre de la Terre et dont les axes ont des directions fixes par rapport aux étoiles. Un tel repère n'appartient pas à la classe des galiléens, le centre d'inertie GT de la Terre n'ayant pas, par rapport au repère absolu, un mouvement rectiligne et uniforme. En effet, désignant par mT la masse de la Terre et par f(M) la densité de force par unité de masse exercée sur la Terre par les autres corps du système solaire, le mouvement galiléen de GT est défini par l'équation :

Les distances qui séparent les corps du système solaire étant très grandes par rapport à celles qui entrent en jeu dans les expériences de mécanique à l'échelle humaine, on montre que, pour tout ensemble matériel situé dans l'environnement de la Terre, on peut admettre, avec une précision supérieure à celle des mesures, qu'un repère ayant son origine au centre de la Terre et dont les axes ont des directions fixes par rapport aux étoiles est galiléen, si l'on convient de négliger les forces extraterrestres.
Considérons maintenant un repère RT lié à la Terre. Par rapport au repère précédemment défini, le repère RT a un mouvement de rotation que l'on peut admettre uniforme autour de la ligne des pôles :

Pour tenir compte du fait que RT n'est pas galiléen, il faut donc introduire les forces d'inertie d'entraînement et complémentaire (théorie du mouvement relatif) dues à la rotation de la Terre sur elle-même. En pratique, l'accélération g de la pesanteur est la résultante de l'accélération newtonienne due à la Terre et de l'accélération d'entraînement due à la rotation de la Terre sur elle-même, changée de signe ; il suffit donc d'ajouter aux forces de pesanteur uniquement les forces d'inertie de Coriolis. Remarquons qu'au voisinage de la Terre le terme provenant des forces d'inertie de Coriolis dues à la rotation de la Terre sur elle-même est très souvent négligeable devant les forces de pesanteur ; ces forces de Coriolis n'interviendront que pour des mouvements très rapides (par exemple rotor de gyroscope) ou pour des mouvements que l'on suit pendant longtemps avec précision.
La Terre pouvant être considérée sensiblement comme une sphère pleine formée de couches concentriques homogènes, l'attraction newtonienne qu'elle exerce est la même en tous les points de sa surface, mais l'accélération d'entraînement due à sa rotation sur elle-même est une fonction de la latitude du lieu considéré. L'intensité g de l'accélération de la pesanteur varie donc suivant la latitude : elle est différente à l'équateur (g = 9,7803 m/s2) et au pôle (g = 9,832 2 m/s2).
- 1. Efforts s'exerçant sur un ensemble mécanique
- 2. Le principe fondamental
- 3. Dynamique analytique pour un ensemble de solides
- 4. Mouvement relatif
- 5. Liaisons mécaniques s'exerçant sur un solide
- 6. Fonction de force
- 7. Intégrales premières des équations de la mécanique
- 8. Galiléens approchés. Accélération de la pesanteur
- 9. Équilibres absolus et relatifs
- 10. Autres applications du principe fondamental
- 11. Bibliographie
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
- Jeanine MOREL : professeur à l'École nationale supérieure de l'enseignement technique
Classification
Pour citer cet article
Michel CAZIN et Jeanine MOREL. DYNAMIQUE [en ligne]. In Encyclopædia Universalis. Disponible sur : (consulté le )
Médias
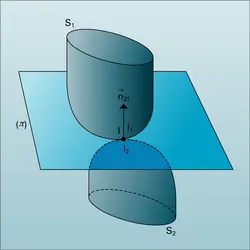
Solides en contact ponctuel
Encyclopædia Universalis France
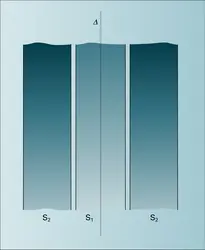
Liaison rotoïde
Encyclopædia Universalis France
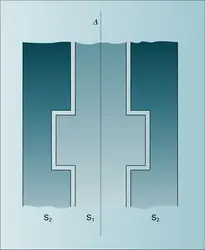
Liaison verrou
Encyclopædia Universalis France
Autres références
-
ALEMBERT JEAN LE ROND D' (1717-1783)
- Écrit par Michel PATY
- 2 874 mots
- 2 médias
 Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de systèmes...
Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de systèmes... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 100 mots
- 2 médias
 Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre...
Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre... -
CAUSALITÉ
- Écrit par Raymond BOUDON, Marie GAUTIER, Bertrand SAINT-SERNIN
- 12 987 mots
- 3 médias
 Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique à...
Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique à... -
FLUIDES MÉCANIQUE DES
- Écrit par Jean-François DEVILLERS, Claude FRANÇOIS, Bernard LE FUR
- 8 791 mots
- 4 médias
Lorsqu'un fluide est en mouvement, la résultante des efforts exercés par le fluide placé d'un côté d'un élément de surface sur le fluide placé de l'autre côté est une force élémentaire dF proportionnelle à l'aire dσ de l'élément de surface :τ est un vecteur,...
- Afficher les 20 références
Voir aussi
- PUISSANCE, physique
- RESSORTS
- REPÈRES ou RÉFÉRENTIELS, mécanique
- EFFORTS, mécanique
- ÉQUILIBRE MÉCANIQUE
- CHOC, mécanique
- FUSÉES
- LIAISONS MÉCANIQUES
- PAINLEVÉ-MOREL THÉORÈME DE
- ACCÉLÉRATION
- CORIOLIS ACCÉLÉRATION ou FORCE DE
- DEGRÉ DE LIBERTÉ
- MÉCANIQUE ANALYTIQUE
- PESANTEUR
- TORSEUR
- FORCE, physique
- LAGRANGE ÉQUATIONS DE
- INTÉGRALES PREMIÈRES
- REPÈRES GALILÉENS
- ROTOÏDE
- VITESSE
- TRANSLATION
- ROTATION
- EULER ÉQUATIONS D'
- STATIQUE
- CENTRE D'INERTIE ou CENTRE DE MASSE, mécanique
- SOLIDE MÉCANIQUE DU
- PROPULSION SPATIALE
- GLISSEMENT
- ÉNERGIE CINÉTIQUE
