

ROBOTS
Le robot industriel
Les différents composants
Structure mécanique
Le robot industriel est essentiellement un système mécanique articulé qui peut positionner et orienter un outil porté par son extrémité, de manière quelconque et désirée, dans un certain volume qu'on nomme espace atteignable du robot. Cet espace est celui qui est balayé par les articulations.

Architecture Scara
Encyclopædia Universalis France
Les articulations peuvent être disposées en série (robot série, qui peut évoquer la structure d'un bras humain) ou en parallèle (robot parallèle). Le plus souvent, ce squelette possède six degrés de liberté : les trois premiers permettent le positionnement et constituent le « porteur » du robot ; les trois derniers forment l'organe terminal du robot et donnent la faculté d'orientation. Le porteur peut présenter plusieurs géométries en fonction du choix de la nature des articulations (translation ou rotation). L'organe terminal porte l'outil de travail qui dépend des tâches que l'on désire réaliser. Il s'agit souvent de pinces à deux ou trois doigts que l'on nomme préhenseurs. La plupart du temps, ces préhenseurs sont amovibles et peuvent être remplacés à la demande par d'autres outils (perceuse, ponceuse...).
Source d'énergie et motorisation
Pour animer ce squelette, il faut bien entendu le doter de moteurs, appelés actionneurs, qui doivent entraîner les articulations. Ils peuvent exploiter une énergie d'origine pneumatique, hydraulique ou électrique ; chaque type, associé à sa source d'énergie, a ses avantages et ses inconvénients vis-à-vis des critères d'utilisation prévus pour le robot.
L'énergie pneumatique présente quelques attraits : elle est disponible dans les ateliers, sa mise en œuvre est simple, le fluide n'est pas polluant, elle est bon marché et la maintenance des systèmes pneumatiques est aisée. Mais elle possède des défauts non négligeables : les actionneurs sont bruyants et le fluide est compressible, ce qui rend très délicate la réalisation d'asservissements dans leur commande. On rencontre des actionneurs pneumatiques sur les robots (ou manipulateurs) dits séquentiels, c'est-à-dire ceux dont les articulations se déplacent d'une position sur butée à une autre position sur butée sans possibilité d'arrêt intermédiaire. Les outils portés par les organes terminaux des robots sont souvent aussi à motorisation pneumatique (pince, perceuse...).
L'énergie hydraulique est celle qui développe la force ou la puissance la plus grande par unité de volume ou de poids d'actionneur. On la rencontre sur les robots devant déplacer des charges supérieures au millier de newtons (100 kg). Elle nécessite la présence d'une centrale onéreuse et a posé des problèmes d'étanchéité et de tuyauteries d'alimentation au niveau des articulations du robot, aujourd'hui bien résolus. En effet, compte tenu des pressions de fluide utilisées, les tuyaux deviennent rigides et introduisent des couples parasites s'opposant au déplacement des articulations.
L'énergie électrique rencontre en général la faveur des utilisateurs ainsi que celle des constructeurs de robots, surtout pour des charges inférieures à 1000 newtons, mais maintenant même bien au dessus. Il n'existe pas de pollution ou de fuite ; la commande peut être précise et fiable grâce à des asservissements robustes ; l'électricité, enfin, est présente partout.
Les actionneurs pneumatiques se présentent sous forme de vérins linéaires, ou même rotatifs, alimentés via des distributeurs à clapet ou à tiroir monovoie ou multivoie. Il en est de même pour les actionneurs hydrauliques où l'on rencontre des vérins linéaires à simple ou double effet ou à effet différentiel, ainsi que des moteurs rotatifs accompagnés de leurs servovalves. La plupart des types de moteur électrique ont été testés[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Philippe COIFFET : membre de l'Académie des technologies, ancien directeur de recherche au C.N.R.S.
Classification
Pour citer cet article
Philippe COIFFET. ROBOTS [en ligne]. In Encyclopædia Universalis. Disponible sur : (consulté le )
Média
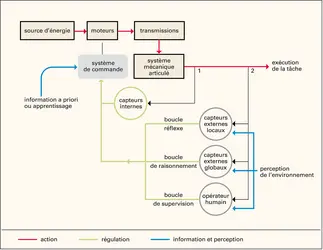
Robots : schéma de principe
Encyclopædia Universalis France
Autres références
-
BREVET DU PREMIER ROBOT INDUSTRIEL
- Écrit par Pierre MOUNIER-KUHN
- 290 mots
Un inventeur indépendant, George C. De Vol, développe et brevette aux États-Unis, en 1954, un système d'enregistrement magnétique capable de commander les opérations d'une machine. Pour le vendre, il crée, avec l'ingénieur Joseph F. Engelberger, la première entreprise de robotique, Unimation Inc....
-
ASIMOV ISAAC (1920-1992)
- Écrit par Lucie CHENU
- 1 077 mots
- 1 média
 Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le...
Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le... -
AUTOMATE
- Écrit par Jean-Claude BEAUNE, André DOYON, Lucien LIAIGRE
- 6 648 mots
- 2 médias
 Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement...
Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement... -
AUTOMATISATION
- Écrit par Jean VAN DEN BROEK D'OBRENAN
- 11 882 mots
- 12 médias
 On ne peut parler d'automatisation sans tenter de définir le robot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter...
On ne peut parler d'automatisation sans tenter de définir le robot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter... -
AUTO-ORGANISATION
- Écrit par Henri ATLAN
- 6 255 mots
- 1 média

Dans les artefacts, par définition construits par l'homme en vue de fins et suivant des plans déjà définis, la signification des structures et des fonctions est définie par rapport à ces fins. C'est dire que, comme ces fins elles-mêmes, extérieures à la machine qu'elles orientent,...
- Afficher les 17 références
Voir aussi
- MOTEURS ÉLECTRIQUES
- PROGRAMME, informatique
- COMMANDE
- ASSERVIS SYSTÈMES
- TRANSMISSION, mécanique
- ACTIONNEURS
- FORMES RECONNAISSANCE DES
- RÉALITÉ VIRTUELLE
- CAMÉRA
- CAPTEURS
- VÉRINS
- INFORMATION, informatique et télécommunications
- DEGRÉ DE LIBERTÉ
- TÉLÉOPÉRATION
- TRAJECTOIRE
- SIMULATION
- INTERACTIVITÉ, informatique
- INTERFACE, informatique
- SENSORIELS ORGANES
- TÉLÉMANIPULATION
- BOUCLE, automatique
- ARTICULATIONS, robotique
- PERCEPTION, robotique
- ROBOTS MOBILES
- ROBOTIQUE HUMANOÏDE
- BIOROBOTIQUE
- TÉLÉPRÉSENCE
- TÉLÉEXISTENCE
- APPRENTISSAGE, informatique et robotique
- CONCEPTION ASSISTÉE PAR ORDINATEUR (CAO)
- GPS (Global Positioning System)
- PERFORMANCES, technologie
- PRODUCTIQUE
- CFAO (conception et fabrication assistées par ordinateur)
- DIALOGUE HOMME-MACHINE
- ATELIER FLEXIBLE
- FLEXIBILITÉ, productique
- MANIPULATION, robotique
- ORGANE TERMINAL, robotique
