

Robotique
Articles
-
BREVET DU PREMIER ROBOT INDUSTRIEL
- Écrit par Pierre MOUNIER-KUHN
- 290 mots
Un inventeur indépendant, George C. De Vol, développe et brevette aux États-Unis, en 1954, un système d'enregistrement magnétique capable de commander les opérations d'une machine. Pour le vendre, il crée, avec l'ingénieur Joseph F. Engelberger, la première entreprise de robotique, Unimation Inc....
-
MICROROBOTS
- Écrit par Philippe BIDAUD
- 296 mots
D'une manière générale, on désigne par microrobots des systèmes qui, du fait des contraintes dimensionnelles qu'ils subissent, ne peuvent pas être conçus à l'aide des technologies classiques utilisées dans les robots macroscopiques, mais avec les microtechnologies voire les...
-
ROBOTIQUE ET PSYCHOLOGIE
- Écrit par Philippe GAUSSIER
- 2 154 mots
- 2 médias
La robotique et les sciences cognitives (psychologie, neurobiologie…) ont un passé commun qui remonte à la création de la cybernétique en 1947 par Norbert Wiener. La cybernétique s’intéresse à la régulation de systèmes complexes et à l’émergence de propriétés liées aux interactions d’un très...
-
ROBOTIQUE - (repères chronologiques)
- Écrit par Pierre MOUNIER-KUHN
- 702 mots
iie siècle avant J.-C. Héron d'Alexandrie, dans son traité sur les Automates, décrit de nombreux appareils utilisant cames, leviers et contrepoids, qui constituent à la fois des divertissements et des exploits mécaniques pour les techniciens de l'Antiquité hellénistique.
1725-1734...
-
ROBOTIQUE CHIRURGICALE
- Écrit par Étienne DOMBRE
- 3 910 mots
- 10 médias
Depuis les années 1980, la robotique a trouvé un nouveau domaine d’application : la chirurgie. Un robot chirurgical se distingue d’un robot industriel par trois caractéristiques : il doit être sûr de fonctionnement car il travaille au contact du patient, du chirurgien et de son équipe ; il doit...
-
ROBOTIQUE HUMANOÏDE ET SANTÉ
- Écrit par Fethi BEN OUEZDOU
- 2 621 mots
La robotique humanoïde a démarré réellement au Japon dans les années 1990, avec comme objectif initial et très ambitieux de créer, à l'image de l'homme, une entité artificielle intelligente capable de le remplacer dans l'accomplissement d'un bon nombre de tâches difficiles, voire dangereuses. Les progrès...
-
ROBOTS
- Écrit par Philippe COIFFET
- 14 080 mots
- 1 média
Les outils et les machines ont souvent été pensés depuis longtemps, mais leur réalisation physique ne pouvait alors aboutir en raison notamment de l'absence de techniques ou matériaux disponibles pour les fabriquer ou pour dépasser le stade de la maquette. Il en est ainsi de l'idée de robot qui n'a trouvé...
-
VIE ARTIFICIELLE
- Écrit par Philippe COLLARD
- 850 mots
L'intelligence artificielle (I.A.), en proposant de concevoir des machines dotées de capacités de raisonnement, constitue la première tentative pour étudier et implémenter sur un média artificiel (ordinateur, robot, etc.) certaines caractéristiques du monde vivant. Cet objectif est très ambitieux....
Médias

Architecture Scara
Encyclopædia Universalis France

Axes mécaniques du tibia et du fémur
E. Stindel
Chaîne d'assemblage robotisée
MPI/ Archive Photos/ Getty Images

Industrie automobile: chaîne de montage
ABB

Industrie automobile: robots sur chaîne de montage
PSA Peugeot Citroën
Industrie électronique (Corée du Sud)
Mark Segal/ Stone/ Getty Images

Micro-robot médical
Institute of Robotics and Intelligent Systems, ETH Zurich

Robot médical
Intuitive Surgical, Inc.

Robot médical
EndoControl

Robotique chirurgicale : robot maître
Hansen Medical

Robots humanoïdes et santé
F.B. Ouezdou/ LISV
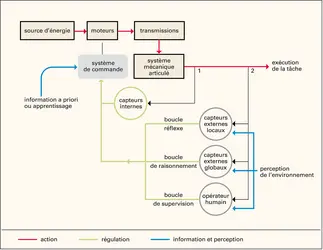
Robots : schéma de principe
Encyclopædia Universalis France
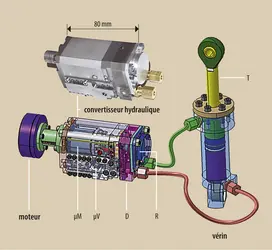
Transmission hydraulique miniaturisée
F.B. Ouezdou/ LISV-BIA
