

ROBOTS
La biorobotique
S'il est une chose claire en robotique scientifique, c'est la suivante : on cherche avec une machine, si possible automatique, à réaliser des tâches qui, jusqu'ici, étaient exécutées par des hommes, soit à mains nues, soit en s'aidant d'outils manuels simples et passifs. Cette substitution à l'homme ne saurait se faire sans rappel des fonctions et caractéristiques de l'homme. Le développement de la robotique se trouve donc entraîné, peut-être par manque d'imagination, sur un terrain qui croise des données de l'anthropomorphisme dont celles ayant trait au fait que l'homme est un être vivant.
Un pas décisif dans cette direction est initié par l'évolution des tâches qu'on souhaite confier au robot. On est passé de tâches industrielles à poste fixe, relativement répétitives et programmables à l'avance, à des missions où l'adaptation permanente et immédiate du robot aux nouvelles données d'un environnement relativement inconnu à l'avance exige des capacités physiques, sensorielles et mentales de plus en plus proches de celles de l'homme.
Par ailleurs, une autre ambition récente de la robotique est l'intégration des robots dans un environnement humain. On constate alors qu'agir dans cet environnement est plus aisé si le mode de locomotion du robot offre les mêmes performances que celle de l'homme, en volume occupé, en agilité et en capacité de franchissement d'obstacles divers. Il n'y a certes pas que la locomotion bipède humaine (que l'on transforme parfois en locomotion quadrupède quand on est à quatre pattes ou en locomotion serpentiforme quand on rampe...) qui puisse satisfaire les contraintes environnementales de la société humaine. Mais on ne peut nier l'intérêt du mode de locomotion de l'homme si on peut l'imiter correctement. De même, les tâches matérielles demandées au robot étant celles habituellement exécutées par l'homme, le système de manipulation ne saurait trop s'éloigner de celui de l'homme pour répondre en toute occasion aux demandes de ce dernier. Enfin, agir en coopération ou en symbiose avec l'homme d'une manière similaire à celle d'un compagnon ou d'un collègue de travail suppose une communication homme-robot qui imite la communication homme-homme. Or celle-là est à la fois gestuelle et orale. Enfin, psychologiquement, l'homme trouvera plus de motivations d'échanges avec une machine humanoïde qu'avec une machine d'apparence vraiment différente.
Tout ceci incite à passer de la robotique à la biorobotique qui fait référence au vivant en général, au-delà de l'humanoïde ou de l'androïde que nous venons d'évoquer.
La biorobotique non anthropomorphe
La biosphère ne comporte pas que des humains mais une infinité d'espèces animales, de la bactérie au mammifère, et une infinité d'espèces végétales, du champignon au séquoia géant.
Comme le robot recherché doit être mobile, le règne végétal n'est pas pris en compte. Il n'en est pas de même pour les animaux qui présentent tous des fonctionnalités intéressantes et néanmoins quelques handicaps.
La première caractéristique d'intérêt des animaux concerne leur appareil locomoteur qui leur permet, pour un grand nombre d'espèces (les seuls déplacements terrestres étant ici pris en considération), de se mouvoir sur pratiquement toutes les terres émergées de la planète, quelle qu'en soit la nature, alors que les meilleurs véhicules fabriqués par l'homme n'ont pas accès à plus de la moitié de ces terres émergées (cf. 3. Le robot mobile). Ainsi, les invertébrés non volants multipodes, les animaux qui rampent, les mammifères quadrupèdes, les oiseaux bipèdes dans leur phase de marche ou de course offrent une immense variété[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Philippe COIFFET : membre de l'Académie des technologies, ancien directeur de recherche au C.N.R.S.
Classification
Pour citer cet article
Philippe COIFFET. ROBOTS [en ligne]. In Encyclopædia Universalis. Disponible sur : (consulté le )
Média
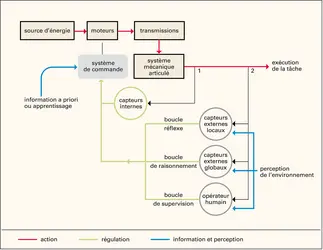
Robots : schéma de principe
Encyclopædia Universalis France
Autres références
-
BREVET DU PREMIER ROBOT INDUSTRIEL
- Écrit par Pierre MOUNIER-KUHN
- 290 mots
Un inventeur indépendant, George C. De Vol, développe et brevette aux États-Unis, en 1954, un système d'enregistrement magnétique capable de commander les opérations d'une machine. Pour le vendre, il crée, avec l'ingénieur Joseph F. Engelberger, la première entreprise de robotique, Unimation Inc....
-
ASIMOV ISAAC (1920-1992)
- Écrit par Lucie CHENU
- 1 077 mots
- 1 média
 Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le...
Dès onze ans, Isaac Asimov écrit. Ses premières nouvelles de science-fiction sont publiées en 1939. Dans la science-fiction des années 1930,le robot était dangereux, se retournant contre son créateur, à l'instar du Golem. Asimov rompt avec cette idée, imaginant un support physiologique (le... -
AUTOMATE
- Écrit par Jean-Claude BEAUNE, André DOYON, Lucien LIAIGRE
- 6 648 mots
- 2 médias
 Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement...
Àla place des « êtres de rêve » ou de leurs enfants dégénérés, c'est le robot hideux qui surgit avec ses lourdes machineries d'acier et ses gestes gauches. Comme le train qui s'entête, dès sa naissance, à singer la diligence, le robot, marqué des pouvoirs nouveaux de l'électricité, de l'asservissement... -
AUTOMATISATION
- Écrit par Jean VAN DEN BROEK D'OBRENAN
- 11 882 mots
- 12 médias
 On ne peut parler d'automatisation sans tenter de définir le robot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter...
On ne peut parler d'automatisation sans tenter de définir le robot. Une des définitions qui en ont été proposées est « manipulateur reprogrammable et multifonctionnel conçu pour transporter des pièces, des outils ou des systèmes spécialisés, avec des mouvements variés et programmés dans le but d'exécuter... -
AUTO-ORGANISATION
- Écrit par Henri ATLAN
- 6 255 mots
- 1 média

Dans les artefacts, par définition construits par l'homme en vue de fins et suivant des plans déjà définis, la signification des structures et des fonctions est définie par rapport à ces fins. C'est dire que, comme ces fins elles-mêmes, extérieures à la machine qu'elles orientent,...
- Afficher les 17 références
Voir aussi
- MOTEURS ÉLECTRIQUES
- PROGRAMME, informatique
- COMMANDE
- ASSERVIS SYSTÈMES
- TRANSMISSION, mécanique
- ACTIONNEURS
- FORMES RECONNAISSANCE DES
- RÉALITÉ VIRTUELLE
- CAMÉRA
- CAPTEURS
- VÉRINS
- INFORMATION, informatique et télécommunications
- DEGRÉ DE LIBERTÉ
- TÉLÉOPÉRATION
- TRAJECTOIRE
- SIMULATION
- INTERACTIVITÉ, informatique
- INTERFACE, informatique
- SENSORIELS ORGANES
- TÉLÉMANIPULATION
- BOUCLE, automatique
- ARTICULATIONS, robotique
- PERCEPTION, robotique
- ROBOTS MOBILES
- ROBOTIQUE HUMANOÏDE
- BIOROBOTIQUE
- TÉLÉPRÉSENCE
- TÉLÉEXISTENCE
- APPRENTISSAGE, informatique et robotique
- CONCEPTION ASSISTÉE PAR ORDINATEUR (CAO)
- GPS (Global Positioning System)
- PERFORMANCES, technologie
- PRODUCTIQUE
- CFAO (conception et fabrication assistées par ordinateur)
- DIALOGUE HOMME-MACHINE
- ATELIER FLEXIBLE
- FLEXIBILITÉ, productique
- MANIPULATION, robotique
- ORGANE TERMINAL, robotique
