
- 1. Les systèmes différentiels linéaires dans le champ réel
- 2. Les systèmes différentiels linéaires dans le champ complexe
- 3. Le problème de Sturm-Liouville
- 4. Les systèmes différentiels non linéaires
- 5. La théorie de la stabilité
- 6. Les solutions périodiques des systèmes différentiels
- 7. Intégration numérique des équations différentielles
- 8. Bibliographie
DIFFÉRENTIELLES ÉQUATIONS
Les équations différentielles sont apparues historiquement tout au début du développement de l'analyse, en général à l'occasion de problèmes de mécanique ou de géométrie. Si, dans les premières investigations, l'on s'attachait surtout à en calculer les solutions au moyen de fonctions déjà connues, très vite ce point de vue s'affirma trop étroit ; c'est qu'en effet le problème fondamental de la théorie des équations différentielles est de déduire les propriétés des solutions d'une équation ou d'un système donné de la forme analytique de ceux-ci ; or, en général, les équations qui résultent d'une investigation théorique en mathématiques ou en physique ne sont pas explicitement intégrables et constituent, bien souvent, la principale source pour la définition de nouvelles fonctions dont les propriétés peuvent être prévues par une analyse systématique de grandes classes d'équations ou de systèmes.
On développera, dans les quelques rubriques qui suivent, les méthodes propres à mettre en évidence l'existence de solutions sous des conditions appropriées et à en étudier les propriétés les plus fondamentales.
Les systèmes différentiels linéaires dans le champ réel
On se propose d'étudier l'existence et les propriétés des solutions du système différentiel linéaire :


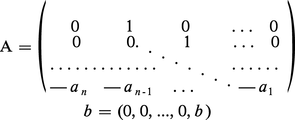
On notera que toute équation différentielle linéaire d'ordre n :

Existence des solutions
Un premier résultat fondamental est donné par le théorème suivant : Le système

Il faut souligner qu'à l'équation (4) on a adjoint la condition initiale (5) ; on obtient ainsi un résultat d'existence et d'unicité.
On notera qu'au système (4), (5) on peut substituer l'équation intégrale équivalente :


On établit la convergence de la suite xm(t ) vers une fonction x(t ) ; on montre ensuite que x(t ) est solution de (4), (5) et qu'il y a unicité.
Le même type d'argument permet d'établir le théorème suivant : Le système

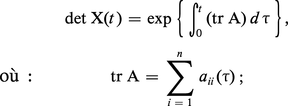
On réservera, dans la suite, la notation X(t ) à cette solution quand on prend pour D la matrice identité I, et l'on dira que X(t ) est la matrice résolvante. Le théorème de Jacobi montre que :
Il est clair que la solution du système (4), (5) peut être représentée par x(t ) = X(t )c.
En prenant pour c les éléments de la base de l'espace vectoriel Rn ou Cn, on obtient n solutions de (4), qui sont les vecteurs dont les composantes sont inscrites successivement dans les colonnes de X(t ). Puisque det X(t ) ≠ 0, les vecteurs sont indépendants quel que soit t. D'ailleurs, si l'on dispose de n solutions indépendantes à l'instant t = 0, elles le demeurent pour tout t : on dira[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Christian COATMELEC : membre de l'Académie des sciences, professeur à l'université de Paris-VI
- Maurice ROSEAU : membre de l'Académie des sciences, professeur de mécanique à l'université de Paris-VI-Pierre-et-Marie-Curie
- Encyclopædia Universalis : services rédactionnels de l'Encyclopædia Universalis
Classification
Autres références
-
ANALYSE MATHÉMATIQUE
- Écrit par Jean DIEUDONNÉ
- 8 528 mots
Les équations différentielles s'étaient présentées dès le début du calcul infinitésimal, soit à propos de la détermination de courbes vérifiant certaines propriétés différentielles, soit comme traductions mathématiques de problèmes de mécanique, d'astronomie ou de physique. Au cours du ... -
ASYMPTOTIQUES CALCULS
- Écrit par Jean-Louis OVAERT et Jean-Luc VERLEY
- 6 250 mots
- 1 média
 Plaçons-nous d'abord dans le cas d'un système linéaire à coefficients constants :où A est une matrice carrée d'ordre n à coefficients complexes et x : t ↦ x (t) une fonction de classe C1 sur [0, + ∞ [ à valeurs dans Cn. Pour toute condition initiale a ∈ ...
Plaçons-nous d'abord dans le cas d'un système linéaire à coefficients constants :où A est une matrice carrée d'ordre n à coefficients complexes et x : t ↦ x (t) une fonction de classe C1 sur [0, + ∞ [ à valeurs dans Cn. Pour toute condition initiale a ∈ ...
-
BUSH VANNEVAR (1890-1974)
- Écrit par Bruno JACOMY
- 1 075 mots
- 1 média
 ...jeu une multitude de problèmes liés au comportement des lignes, à leur infrastructure ou à la topographie du terrain. Leur résolution fait appel à des équations différentielles complexes que les ingénieurs résolvent généralement par intégration graphique, en calculant l’aire définie par une courbe....
...jeu une multitude de problèmes liés au comportement des lignes, à leur infrastructure ou à la topographie du terrain. Leur résolution fait appel à des équations différentielles complexes que les ingénieurs résolvent généralement par intégration graphique, en calculant l’aire définie par une courbe.... -
CALCUL INFINITÉSIMAL - Histoire
- Écrit par René TATON
- 11 465 mots
- 3 médias
 On sait que plusieurs savants de la première moitié du xviie siècle avaient rencontré certains problèmes relatifs à des équations différentielles, problèmes auxquels ils n'avaient su donner qu'une présentation et qu'une solution imparfaites. Dès la mise au point de leurs méthodes de calcul infinitésimal,...
On sait que plusieurs savants de la première moitié du xviie siècle avaient rencontré certains problèmes relatifs à des équations différentielles, problèmes auxquels ils n'avaient su donner qu'une présentation et qu'une solution imparfaites. Dès la mise au point de leurs méthodes de calcul infinitésimal,... - Afficher les 27 références
