

MÉCANIQUE Mécanismes
Analyse d'un mécanisme
Les méthodes d'analyse rigoureuse qui permettent de prouver qu'un mécanisme, défini comme un ensemble de solides assemblés entre eux, fonctionne correctement ou qui conduisent à bâtir un mécanisme répondant aux besoins utilisent soit la cinématique, soit la dynamique des solides.
Paramètre de définition du solide
Il faut d'abord définir le nombre de paramètres caractérisant un solide (cf. cinématique, dynamique). La notion de mouvement étant plus visuelle que la notion d'effort, on choisira donc des paramètres cinématiques. La position d'un solide est complètement
déterminée par celle de deux vecteurs OA, OB non confondus, soit six composantes sur un système d'axes. Le champ des vitesses est parfaitement défini par la connaissance des deux vecteurs (vitesse linéaire, vitesse angulaire) en un point A du solide : VA (vitesse linéaire de A) ; →WA (vitesse angulaire autour de l'axe instantané de rotation passant par A), soit six composantes ; en un point B du même solide, les vitesses sont :

Équations de liaison

Appuis simples : types
Encyclopædia Universalis France
Les solides ou pièces sont assemblés entre eux ou liés l'un par rapport à l'autre. L'assemblage porte le nom de couple. Il peut être caractérisé par les équations de liaison issues de l'analyse des mouvements relatifs ainsi gênés, nommés « obstacles ». L'assemblage doit être réalisable et utilisable ; aussi les surfaces de liaison ou surfaces fonctionnelles comporteront des cylindres, des plans et des sphères ; le seul contact bien défini est le contact ponctuel. Les couples de base se réduisent à l'appui simple, à l'anneau, au couple sphérique. Les équations caractéristiques de la liaison expriment le torseur du mouvement relatif :




La sphère est définie par les trois équations de projection de l'équation :

Appuis simples : composition
Encyclopædia Universalis France
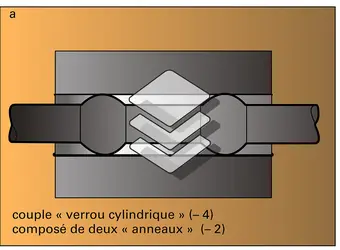
On peut définir la liaison par le nombre d'équations affectées du signe (−), puisque l'on a des obstacles au mouvement relatif ; sur la figure, on a les assemblages : (− 1), (− 2), (− 3). Des assemblages plus complets sont conçus à partir de ces éléments de base, le verrou cylindrique (− 4), le couple rotoïde (− 5), le couple prismatique (− 5), par exemple.
En réalité, ce ne sont que des modèles. Pour que les assemblages résistent aux efforts imposés, on accepte un hyperstatisme local en remplaçant le contact ponctuel par un contact entre surfaces.
Loi fondamentale des mécanismes
Un mécanisme est formé d'un nombre p de pièces assemblées entre elles et à l'élément principal, le bâti O ; les assemblages sont au nombre de a ; chacun d'eux est caractérisé par |Li,j| équations de liaison. On dispose de :


Si toutes les équations sont indépendantes, s'il n'existe aucune particularité géométrique, d représente le degré de liberté du mécanisme : si d = 0, le mécanisme est stable et tous les paramètres sont définis, si d = 1, c'est un mécanisme de transformation de mouvement, car on peut obtenir une relation interne entre un paramètre de la pièce d'entrée et de la pièce de sortie ; si d > 1, il y a plusieurs degrés de liberté et si d < 0, le mécanisme est dit hyperstatique.[...]
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Robert LE BORZEC : professeur à l'École nationale supérieure des arts et métiers
Classification
Pour citer cet article
Robert LE BORZEC. MÉCANIQUE - Mécanismes [en ligne]. In Encyclopædia Universalis. Disponible sur : (consulté le )
Médias
Appuis simples : types
Encyclopædia Universalis France
Appuis simples : composition
Encyclopædia Universalis France

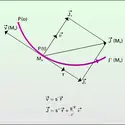
Mécanismes plan et sphérique
Encyclopædia Universalis France
Autres références
-
ACTION & RÉACTION, physique
- Écrit par Jean-Marc LÉVY-LEBLOND
- 1 498 mots
...Théodicée de Leibniz, que la physique voit s'imposer une autre notion d'action. À l'origine de cette terminologie donc, la puissance divine. Plus laïquement, Joseph Louis Lagrange (1736-1813) montrera que la mécanique de Newton peut se déduire d'un « principe variationnel ». L'idée en est... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 100 mots
- 2 médias
 La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile...
La balistique extérieure peut être considérée comme une branche de la mécanique rationnelle. À ce titre, elle cherche à mettre sous forme d'équation le mouvement d'un projectile tiré par une bouche à feu ou celle d'un missile autopropulsé. L'étude comporte le mouvement du centre de gravité du projectile... -
CAUSALITÉ
- Écrit par Raymond BOUDON, Marie GAUTIER, Bertrand SAINT-SERNIN
- 12 987 mots
- 3 médias
 ...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa...
...qui trouble les contemporains, celle d'action à distance : les corps s'attirent en raison de leur masse et en raison inverse du carré de leur distance. L'explication causale se moule sur les principes de la mécanique newtonienne, qui, en philosophie, inspire très directement la réflexion de Kant et sa... -
CINÉMATIQUE
- Écrit par Michel CAZIN, Jeanine MOREL
- 5 545 mots
- 10 médias
La cinématique est la théorie qui, à l'intérieur de la mécanique, a pour objet la description des mouvements des systèmes matériels.
Deux notions sont absolument indispensables à l'élaboration de la cinématique sous sa forme classique : celle de solide invariable et celle de temps...
- Afficher les 38 références
Voir aussi
- BIELLE-MANIVELLE SYSTÈME
- BOÎTE DE VITESSES
- CAME, technologie
- LIAISONS MÉCANIQUES
- DEGRÉ DE LIBERTÉ
- FORCE, physique
- VITESSE
- TRANSLATION
- ROTATION
- MÉCANISMES
- APPUI SIMPLE
- ASSEMBLAGE, technique
- EXCENTRIQUE, mécanique
- RÉDUCTEUR, mécanique
- MULTIPLICATEUR, mécanique
- VARIATEUR
- VIS-ÉCROU SYSTÈME
- ÉNERGIE MÉCANIQUE
