

DYNAMIQUE
- 1. Efforts s'exerçant sur un ensemble mécanique
- 2. Le principe fondamental
- 3. Dynamique analytique pour un ensemble de solides
- 4. Mouvement relatif
- 5. Liaisons mécaniques s'exerçant sur un solide
- 6. Fonction de force
- 7. Intégrales premières des équations de la mécanique
- 8. Galiléens approchés. Accélération de la pesanteur
- 9. Équilibres absolus et relatifs
- 10. Autres applications du principe fondamental
- 11. Bibliographie
Intégrales premières des équations de la mécanique
Les équations de la mécanique déduites du principe fondamental forment un système de n équations différentielles du second ordre (que l'on peut toujours ramener à un système de 2 n équations différentielles du premier ordre) dont l'intégration dépend de 2 n constantes qui, dans un problème de mécanique, sont les conditions initiales, c'est-à-dire la donnée des qi(t0) et des q′i(t0) à un instant t0 pris comme instant initial.
On appelle intégrale première toute fonction f (qi, q′i, t ) qui reste constante au cours du mouvement en vertu des équations déduites du principe fondamental exprimé sous l'une des formes suivantes : théorèmes généraux, théorème de l'énergie-puissance et équations de Lagrange. Donnons quelques exemples d'obtention d'intégrales premières. Théorème de la somme géométrique.
Si u désigne le vecteur unitaire d'un axe fixe dans le galiléen et si Jg(G) ( u = 0, on a : Vg(G) ( u = constante (intégrale première).
Ce résultat n'est plus valable si u n'est pas fixe dans (g) (alors dgu/dt ≠ 0).
Si Jg(G) = 0, alors Vg(G) = C, vecteur constant, ce qui fournit trois intégrales premières scalaires.
Théorème du moment dynamique
Si u ( MI {AgΣ} = 0 et si, de plus, I est un point fixe dans le galiléen (ou le centre d'inertie de Σ), u désignant le vecteur unitaire d'un axe fixe dans le galiléen, alors on peut écrire l'intégrale première u ( MI {pgΣ} = Cte.
Si MI {AgΣ} = 0 et si I est un point fixe dans le galiléen (ou le centre d'inertie de Σ), on en déduit MI {pgΣ} = C, vecteur constant dans le galiléen, et on obtient, par projection sur trois axes fixes dans (g), trois intégrales premières scalaires.
Théorème de l'énergie-puissance et théorème de Painlevé-Morel
Plaçons-nous dans le cas général où les liaisons dépendent du temps :

Alors, l'énergie cinétique a pour expression :
On peut distinguer dans cette fonction, respectivement, les ensembles de termes homogènes et de degré deux, un et zéro par rapport aux q′k et écrire :
Le théorème de l'énergie s'écrit, pour un ensemble Σ de solides,

Prenons ici :
Les efforts extérieurs à Σ et les interefforts entre les Si peuvent se décomposer en :
– un torseur inconnu maintenant la liaison dépendant du temps ;
– un torseur d'actions de contact (de Σ, avec des ensembles matériels extérieurs à Σ, et des Si entre eux) ; ce torseur est en général inconnu ;
– un torseur d'efforts connus, soit efforts extérieurs (par exemple la pesanteur), soit interefforts entre les Sj (attraction newtonienne, interactions électriques, etc.).
Un calcul direct montre que la puissance développée par le torseur qui maintient la liaison dépendant du temps est :

En utilisant ce premier résultat important, on obtient la formule fondamentale :

Les conditions suffisantes (mais qui ne sont évidemment pas nécessaires) souvent rencontrées en pratique pour que le théorème de l'énergie donne une intégrale première sont les suivantes :
– si la puissance des efforts de contact (des Si entre eux et de Σ avec les ensembles matériels extérieurs à Σ) est nulle ;
– si les forces données dérivent d'une fonction de forces U ;
– si T + U ne dépend pas explicitement du temps, on a :

Lorsque les liaisons ne dépendent pas du temps, on obtient, comme cas particulier (compte tenu de T0g ≡ 0) des conditions suffisantes d'existence de l'intégrale première de l'énergie cinétique,

Équations de Lagrange
Si, pour un paramètre qk, on a

- 1. Efforts s'exerçant sur un ensemble mécanique
- 2. Le principe fondamental
- 3. Dynamique analytique pour un ensemble de solides
- 4. Mouvement relatif
- 5. Liaisons mécaniques s'exerçant sur un solide
- 6. Fonction de force
- 7. Intégrales premières des équations de la mécanique
- 8. Galiléens approchés. Accélération de la pesanteur
- 9. Équilibres absolus et relatifs
- 10. Autres applications du principe fondamental
- 11. Bibliographie
La suite de cet article est accessible aux abonnés
- Des contenus variés, complets et fiables
- Accessible sur tous les écrans
- Pas de publicité
Déjà abonné ? Se connecter
Écrit par
- Michel CAZIN : professeur au Conservatoire national des arts et métiers
- Jeanine MOREL : professeur à l'École nationale supérieure de l'enseignement technique
Classification
Pour citer cet article
Michel CAZIN et Jeanine MOREL. DYNAMIQUE [en ligne]. In Encyclopædia Universalis. Disponible sur : (consulté le )
Médias
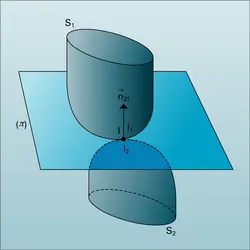
Solides en contact ponctuel
Encyclopædia Universalis France
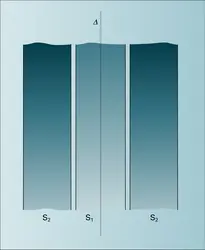
Liaison rotoïde
Encyclopædia Universalis France
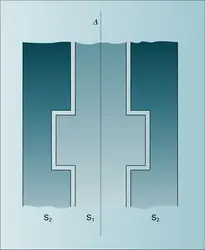
Liaison verrou
Encyclopædia Universalis France
Autres références
-
ALEMBERT JEAN LE ROND D' (1717-1783)
- Écrit par Michel PATY
- 2 874 mots
- 2 médias
 Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de systèmes...
Son Traité de dynamique de 1743 propose une réduction et une unification de la mécanique des corps solides, en énonçant et démontrant le théorème général de la dynamique, qui est connu depuis lors comme « principe de d'Alembert » et qui fournit la loi de mouvements quelconques de systèmes... -
BALISTIQUE
- Écrit par Jean GARNIER
- 2 100 mots
- 2 médias
 Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre...
Pour écrire l'équation de la trajectoire d'un projectile tiré par un canon, il suffit d'appliquer le principe fondamental de la dynamique : la somme des forces extérieures appliquées au projectile est égale au produit de sa masse par la dérivée du vecteur vitesse Vg du centre... -
CAUSALITÉ
- Écrit par Raymond BOUDON, Marie GAUTIER, Bertrand SAINT-SERNIN
- 12 987 mots
- 3 médias
 Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique à...
Au xviie siècle, la statique se trouve absorbée dans une science nouvelle, la dynamique, qui s'intéresse à l'état de mouvement des corps et aux causes qui le produisent. En outre, physique céleste et physique terrestre s'unifient : le mouvement de la Lune autour de la Terre apparaissant identique à... -
FLUIDES MÉCANIQUE DES
- Écrit par Jean-François DEVILLERS, Claude FRANÇOIS, Bernard LE FUR
- 8 791 mots
- 4 médias
Lorsqu'un fluide est en mouvement, la résultante des efforts exercés par le fluide placé d'un côté d'un élément de surface sur le fluide placé de l'autre côté est une force élémentaire dF proportionnelle à l'aire dσ de l'élément de surface :τ est un vecteur,...
- Afficher les 20 références
Voir aussi
- PUISSANCE, physique
- RESSORTS
- REPÈRES ou RÉFÉRENTIELS, mécanique
- EFFORTS, mécanique
- ÉQUILIBRE MÉCANIQUE
- CHOC, mécanique
- FUSÉES
- LIAISONS MÉCANIQUES
- PAINLEVÉ-MOREL THÉORÈME DE
- ACCÉLÉRATION
- CORIOLIS ACCÉLÉRATION ou FORCE DE
- DEGRÉ DE LIBERTÉ
- MÉCANIQUE ANALYTIQUE
- PESANTEUR
- TORSEUR
- FORCE, physique
- LAGRANGE ÉQUATIONS DE
- INTÉGRALES PREMIÈRES
- REPÈRES GALILÉENS
- ROTOÏDE
- VITESSE
- TRANSLATION
- ROTATION
- EULER ÉQUATIONS D'
- STATIQUE
- CENTRE D'INERTIE ou CENTRE DE MASSE, mécanique
- SOLIDE MÉCANIQUE DU
- PROPULSION SPATIALE
- GLISSEMENT
- ÉNERGIE CINÉTIQUE
